

Anti-Roll Back(简称ARB)是新能源车独有的防溜坡系统,主要利用驱动电机堵转扭矩来实现车辆在坡道上稳定停车。本文将从控制策略、软件实现、仿真验证三方面,来谈谈ARB控制的具体内容。
ARB基本控制思路:整车根据车速、档位等信息,判断是否激活ARB功能,并将激活标志位发给驱动电机;电机根据ARB标志位判断是否进入零转速控制,保持车辆稳定。所以,ARB控制策略可分为两部分:功能激活判定和零转速控制。一般,前者属于VCU控制,后者属于DCU控制。
当ARB激活标志位置位时,电机进入零转速控制模式;当ARB激活标志位重置后,电机重新回到正常的扭矩控制模式。
基于上面的控制策略,在Simulink中设计了ARB控制软件,与车辆模型一起构成了一个基础的仿真平台,如下图所示。
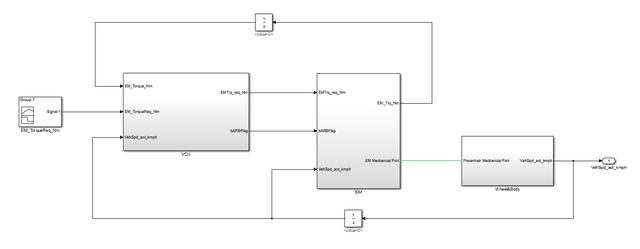
主要考虑了车速、电机请求扭矩对激活ARB功能的影响,其他几个条件相对比较好理解,在模型中暂未体现。

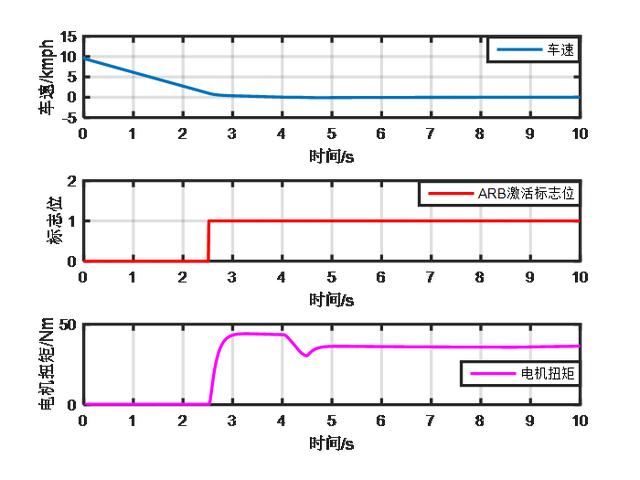
可以看出,放开ARB功能后,当车速减速接近于0时,ARB标志位成功激活,电机迅速出扭矩把车速控制在0车速附近,保证车辆驻坡稳定。
仿线:放开ARB功能,坡度5度,车辆以10km/h的初速度在坡道上滑行10秒,在第6秒开始逐渐给一个驾驶员请求扭矩。
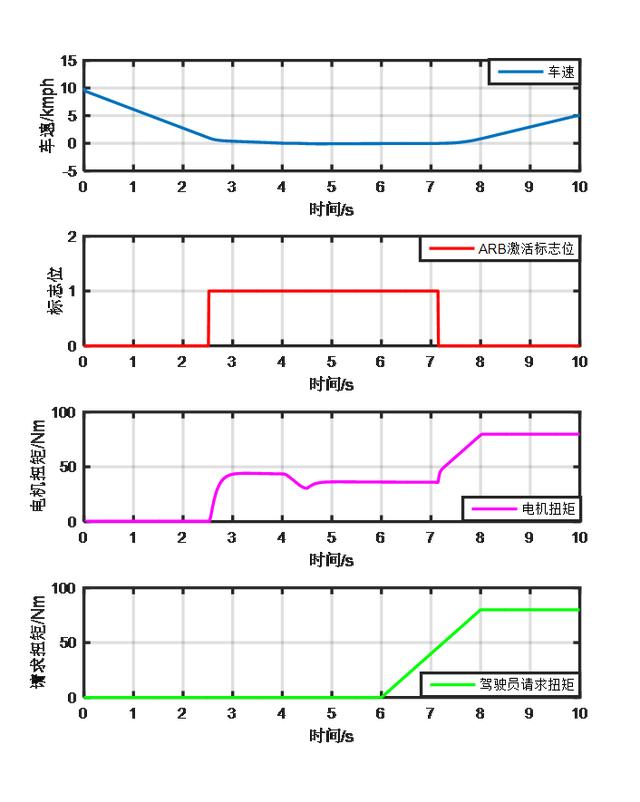
可以看出,前6秒与仿线工况一样,曲线秒开始,驾驶员扭矩开始缓慢上升,ABS依然处于激活状态维持车辆稳定,直到7.1秒左右,驾驶员请求扭矩大于电机实际扭矩时,才退出ARB功能,电机进入扭矩模式,电机开始响应驾驶员扭矩请求,车辆也逐渐开始加速。
小结:通过三组仿真测试,可以看出本文的ARB控制策略基本有效,能让车辆驻坡时自动进入和适时退出ARB功能。
低附路面下,车轮打滑时用轮速计算的车速不能代表真实车速,所以容易误触发ARB功能,需要做好车速估计或者采用其他可替代的方法。
以上,从控制策略、软件实现、仿真验证三方面简要介绍了ARB控制的相关内容,供大家学习参考,想实现ARB功能实车级别的使用,还有较多细节和功能交互需要考虑。
